重磅!李建軍會長牽頭項目榮獲廣東省科技進步一等獎
2024泰國國際橡塑展
鈣鈦礦薄膜的均勻結(jié)晶和埋底鈍化策略:刷新全鈣鈦礦疊層光伏組件紀錄效率
蘇州金緯智能技術(shù)有限公司 總經(jīng)理-方安樂
博創(chuàng)智能裝備股份有限公司 董事長-朱康建
科技和產(chǎn)業(yè)變革將推動行業(yè)加快轉(zhuǎn)型發(fā)展
匯聚權(quán)威專家 推動工程塑料高質(zhì)量發(fā)展——第九屆中國國際工程塑料產(chǎn)業(yè)創(chuàng)新大會








 (1)式中:
(1)式中:
 (2)式中:
(2)式中: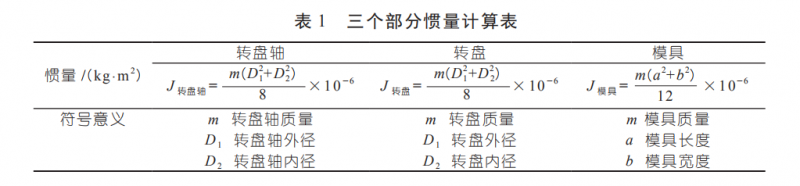
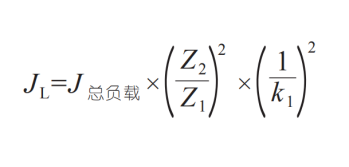 (4)
(4)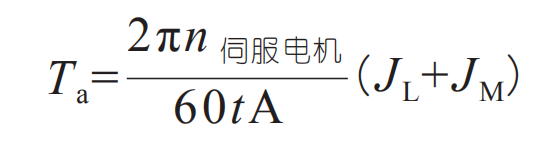 (5)
(5)














 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





