武文軒
(上海 ABB 工程有限公司 上海 201319)
摘要:機(jī)械手是一種能自動(dòng)化定位控制并可根據(jù)需求重新編程的多功能機(jī)器,在工業(yè)自動(dòng)化生產(chǎn)中占據(jù)著重要位置����。機(jī)械手的驅(qū)動(dòng)方式可以是液壓傳動(dòng)、氣壓傳動(dòng)�,也可以是電氣控制等。通過(guò)對(duì)一種快速抓取式機(jī)械手的設(shè)計(jì)��,主要對(duì)手爪部分計(jì)算校核,并且對(duì)抓取誤差的產(chǎn)生進(jìn)行分析��。
關(guān)鍵詞:搬運(yùn)機(jī)器人�;機(jī)械手;結(jié)構(gòu)設(shè)計(jì)���;誤差分析
機(jī)械手的驅(qū)動(dòng)方式有氣壓傳動(dòng)���、液壓傳動(dòng)、電氣傳動(dòng)和機(jī)械傳動(dòng)�。廣泛使用的氣壓技術(shù)以壓縮空氣為介質(zhì),具有動(dòng)作迅速��、平穩(wěn)��、可靠�、結(jié)構(gòu)簡(jiǎn)單輕便�、體積小、節(jié)能���、工作壽命長(zhǎng)的特點(diǎn)�。
對(duì)易于控制��、無(wú)環(huán)境污染的場(chǎng)合,自由度技術(shù)常作為機(jī)械手的驅(qū)動(dòng)系統(tǒng)的首選�。自由度機(jī)械手與其它控制方式的機(jī)械手相比,具有無(wú)污染����、抗干擾性強(qiáng)、價(jià)格低廉�、結(jié)構(gòu)簡(jiǎn)單、功率體積比高等特點(diǎn)��。
1 機(jī)械手總體設(shè)計(jì)
1.1 機(jī)械手工作原理
機(jī)械手的種類很多���,但按手臂坐標(biāo)類型來(lái)分主要有直角坐標(biāo)式��、圓柱坐標(biāo)式�、球坐標(biāo)式����、關(guān)節(jié)坐標(biāo)式、SCARA 型等��。
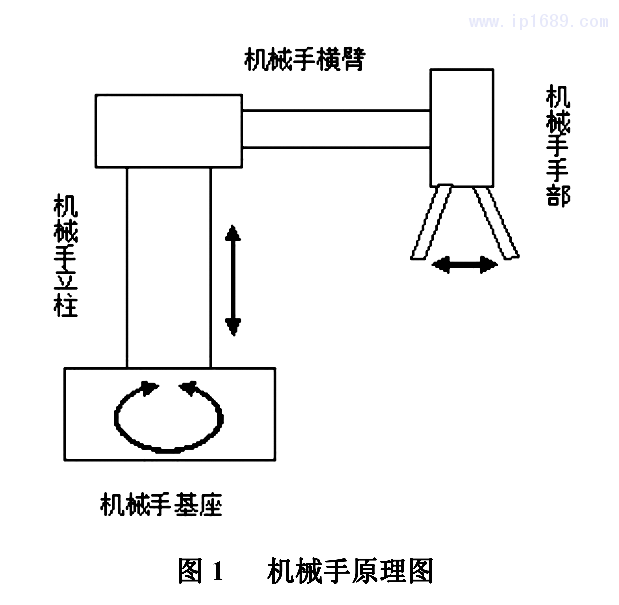
本論文所針對(duì)的機(jī)械手屬于圓柱坐標(biāo)式�,如圖1所示。機(jī)械手主要是由基座和手臂兩部分組成��,基座的主要任務(wù)是支撐和完成手臂回轉(zhuǎn)。手臂裝在基座上�,作上下直線運(yùn)動(dòng),手部可夾緊/放松��。
本機(jī)械手的全部動(dòng)作由氣缸驅(qū)動(dòng)����,氣缸由電磁閥控制。驅(qū)動(dòng)部分有升降氣缸�、擺動(dòng)氣缸和手部驅(qū)動(dòng)氣缸。
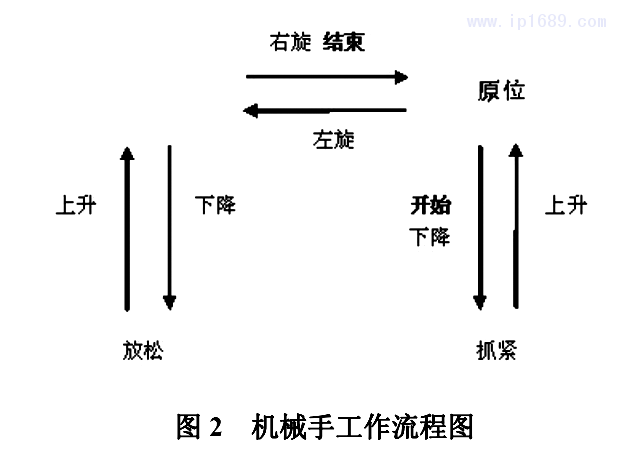
本機(jī)械手氣壓驅(qū)動(dòng)的工作壓力為0.6MPa��,最高可達(dá)1MPa����。這個(gè)機(jī)械手具有兩個(gè)直線運(yùn)動(dòng)和一個(gè)旋轉(zhuǎn)運(yùn)動(dòng)自由度,用于將原工作臺(tái)上的物品搬到其左側(cè)工作臺(tái)上�。整個(gè)機(jī)械手在工作中能實(shí)現(xiàn)上升/下降����、左旋轉(zhuǎn)/右旋轉(zhuǎn)、夾緊/放松功能����,是目前較為簡(jiǎn)單的��、應(yīng)用比較廣泛的一種機(jī)械手�。機(jī)械手的工作流程如圖2所示��。
其升降運(yùn)動(dòng)通過(guò)升降氣缸���、垂直導(dǎo)柱��、滑動(dòng)導(dǎo)柱����、垂直導(dǎo)軌及升
降位置微動(dòng)開(kāi)關(guān)相互配合完成��, 升降工作行程為0~1500 mm���。轉(zhuǎn)動(dòng)是通過(guò)擺動(dòng)氣缸��、軸向止推軸承�、擺動(dòng)臂及擺動(dòng)位置微動(dòng)開(kāi)關(guān)協(xié)調(diào)完成���,轉(zhuǎn)動(dòng)工作角度范圍為 0~180°����。手部是通過(guò)氣缸、彈簧的作用來(lái)夾持物品����,夾持力是靠調(diào)節(jié)彈簧的預(yù)壓縮量來(lái)控制。
1.2 機(jī)械手系統(tǒng)總體設(shè)計(jì)方案
本設(shè)計(jì)機(jī)械手主要由4個(gè)大部件和5個(gè)液壓缸組成:(1)手部����,采用一個(gè)直線液壓缸,通過(guò)機(jī)構(gòu)運(yùn)動(dòng)實(shí)現(xiàn)手爪的張合��;(2)腕部����,采用一個(gè)回轉(zhuǎn)液壓缸實(shí)現(xiàn)手部回轉(zhuǎn) 180°;(3)臂部��,采用直線缸來(lái)實(shí)現(xiàn)手臂平移 1.2 m���;(4)機(jī)身�,采用一個(gè)直線缸和一個(gè)回轉(zhuǎn)缸來(lái)實(shí)現(xiàn)手臂升降和回轉(zhuǎn)����。
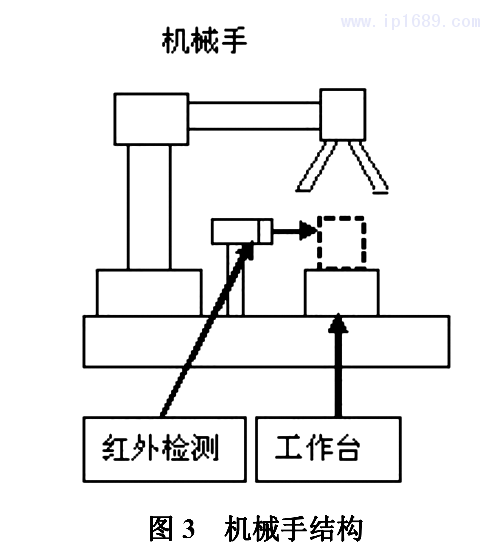
機(jī)械手及工作臺(tái)組成的機(jī)械手搬運(yùn)系統(tǒng),其結(jié)構(gòu)如圖3所示����。
機(jī)械手、工作臺(tái)和紅外檢測(cè)器固定在一個(gè)大型的基座上���。機(jī)械手的手部正下方有工作臺(tái)���,用于放置物品。在機(jī)械手的基座和工作臺(tái)之間安裝有一個(gè)紅外檢測(cè)器���,用于檢測(cè)工作臺(tái)上是否有物品���。機(jī)械手把物品從系統(tǒng)外抓取移送到右面的工作臺(tái)上。
2機(jī)械手運(yùn)動(dòng)分析及計(jì)算
2.1 手部設(shè)計(jì)基本要求
(1)應(yīng)具有適當(dāng)?shù)膴A緊力和驅(qū)動(dòng)力�。應(yīng)當(dāng)考慮到在一定的夾緊力下,不同的傳動(dòng)機(jī)構(gòu)所需的驅(qū)動(dòng)力大小是不同的�。
(2)手指應(yīng)具有一定的張開(kāi)范圍,手指應(yīng)該具有足夠的開(kāi)閉角度?y(手指從張開(kāi)到閉合繞支點(diǎn)所轉(zhuǎn)過(guò)的角度)����,以便于抓取工件。
(3)在保證本身剛度�、強(qiáng)度的前提下,盡可能使結(jié)構(gòu)緊湊、重 量輕���,以利于減輕機(jī)械臂的負(fù)載�,提高效率����。
(4)應(yīng)保證手爪的夾持精度。
2.2 典型的手部結(jié)構(gòu)
(1)回轉(zhuǎn)型:包括滑槽杠桿式和連桿杠桿式兩種���。
(2)移動(dòng)型:即兩手指相對(duì)支座作往復(fù)運(yùn)動(dòng)��。
(3)平面平移型���。
2.3 機(jī)械手手部的設(shè)計(jì)計(jì)算
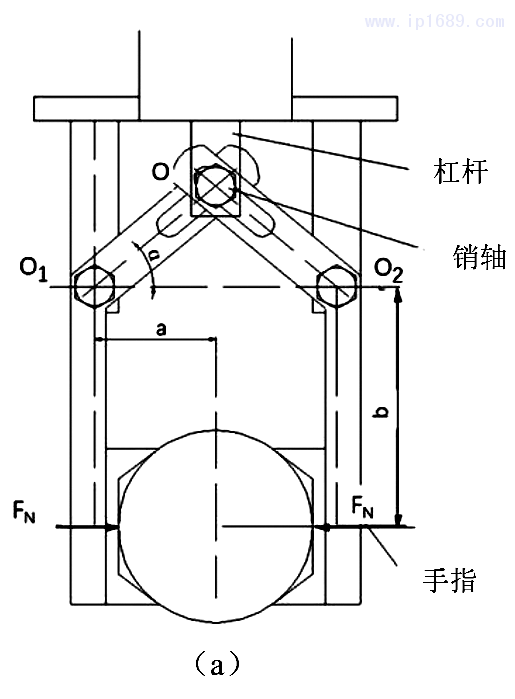
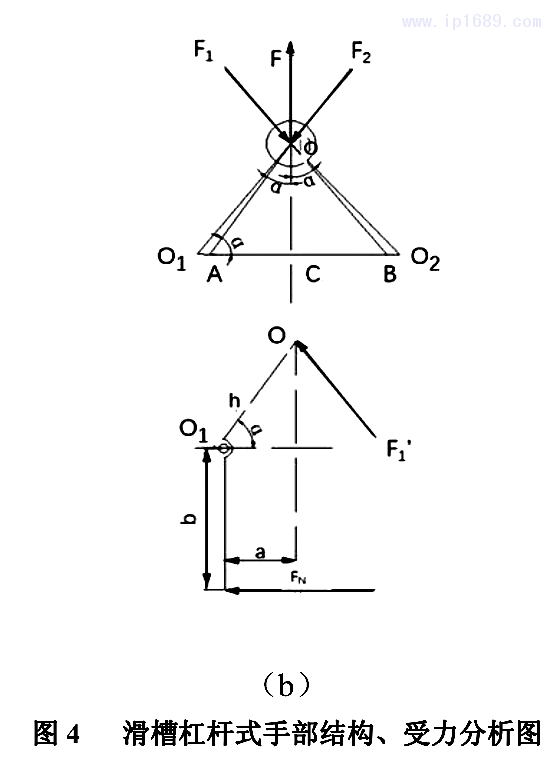
下面對(duì)滑槽杠桿式手部結(jié)構(gòu)進(jìn)行力學(xué)分析:圖4(a)為常見(jiàn)的滑槽杠桿式手部結(jié)構(gòu)。
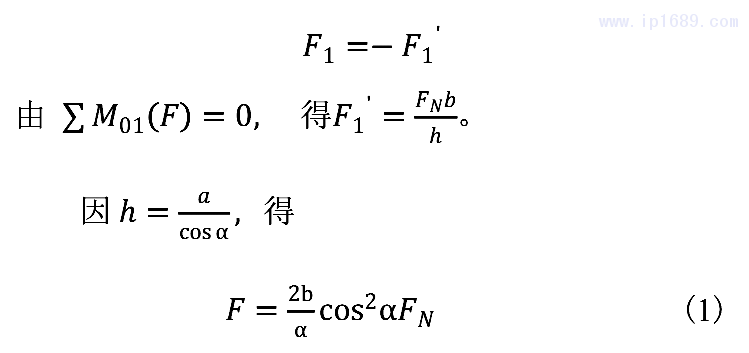
在杠桿的作用下���,銷軸向上的拉力為F�,并通過(guò)銷軸中心0點(diǎn)�,兩手指的滑槽對(duì)銷軸的反作用力為F1和F2,其力的方向垂直于滑槽的中心線001和002并指向0點(diǎn)��,交F1和F2的延長(zhǎng)線于A及B�。
式中:α為手指的回轉(zhuǎn)支點(diǎn)到對(duì)稱中心的距離(mm)���,α為工件被夾緊時(shí)手指的滑槽方向與兩回轉(zhuǎn)支點(diǎn)的夾角��。
由分析可知,當(dāng)驅(qū)動(dòng)力F一定時(shí),a角增大,則握力FN也隨之增大,但α角度過(guò)大會(huì)導(dǎo)致拉桿行程過(guò)長(zhǎng),以及手部結(jié)構(gòu)增大,因此最好a= 30°~40°��。
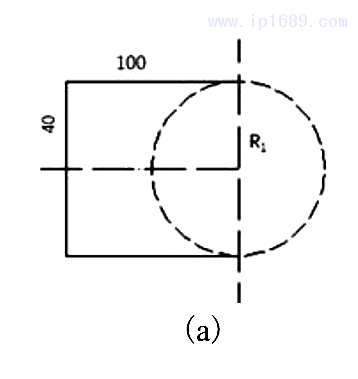
為了保證手爪張開(kāi)角為60°����,活塞桿運(yùn)動(dòng)長(zhǎng)度為34mm。
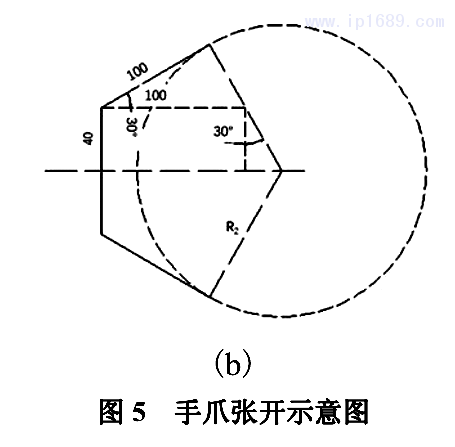
手爪夾持范圍����,在100mm以內(nèi)。當(dāng)手爪沒(méi)有張開(kāi)角的時(shí)候��,如圖5(a)所示�,根據(jù)機(jī)構(gòu)設(shè)計(jì),它的最小夾持半徑R1 =40mm�,當(dāng)張開(kāi)角為60°時(shí),如圖5(b)所示����,最大夾持半徑R2計(jì)算如下:
所以機(jī)械手的夾持半徑在40~100 mm。
2.4 機(jī)械手手爪夾持精度的分析計(jì)算
機(jī)械手的精度設(shè)計(jì)要求工件定位準(zhǔn)確��,抓取精度高,重復(fù)定位精準(zhǔn)及運(yùn)動(dòng)穩(wěn)定性好��,并有足夠的抓取能力����。
機(jī)械手能否準(zhǔn)確夾持工件,把工件送到指定位置����,不僅取決于機(jī)械手的定位精度(由臂部和腕部等運(yùn)動(dòng)部件來(lái)決定),而且也與機(jī)械手夾持誤差大小有關(guān)����,特別是在多品種的中、小批量生產(chǎn)中��。為了適應(yīng)工件尺寸在一定范圍內(nèi)變化��,一定要進(jìn)行機(jī)械手的夾持誤差計(jì)算分析����。
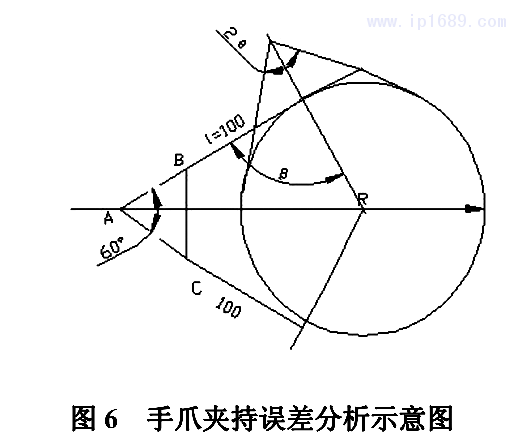
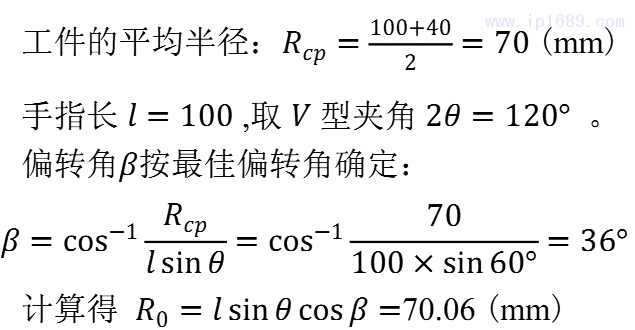
該設(shè)計(jì)以棒料來(lái)分析機(jī)械手的夾持誤差精度,如圖6所示���。
機(jī)械手的夾持直徑范圍為80mm~200mm��,一般夾持誤差不超過(guò)1mm�,分析如下:
2.5 彈簧的設(shè)計(jì)計(jì)算
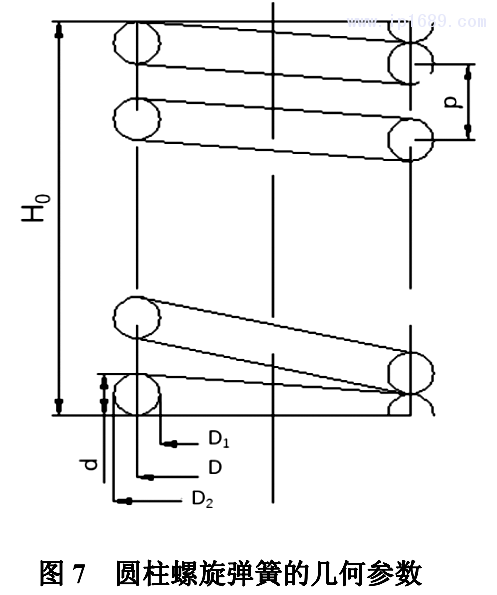
選擇彈簧是壓縮條件,選擇圓柱壓縮彈簧��。如圖7所示,計(jì)算過(guò)程如下����。
(1)選擇硅錳彈簧鋼,查取許用切應(yīng)力:
(2)選擇旋繞比C=8,則
(3)根據(jù)安裝空間選擇彈簧中徑D=42(mm),估算彈簧絲直徑:
(4)試算彈簧絲直徑:
(5)根據(jù)變形情況確定彈簧圈的有效圈數(shù)∶
選擇標(biāo)準(zhǔn)為n=3 �,彈簧的總?cè)?shù)n1 =n+1.5 = 4.5 圈。
(6)最后確定D=42(mm)���,d=7(mm)����,D1=D-d=35(mm)�,D2=D+d=49(mm)

(7)對(duì)于壓縮彈簧穩(wěn)定性的驗(yàn)算
對(duì)于壓縮彈簧如果長(zhǎng)度較大時(shí),則受力后容易失去穩(wěn)定性����,這在工作中是不允許的。為了避免這種現(xiàn)象,壓縮彈簧的長(zhǎng)細(xì)比����。本設(shè)計(jì)彈簧是2端自由,根據(jù)下列選取:
當(dāng)兩端固定時(shí)�,b≤ 5.3����;當(dāng)一端固定,一端自由時(shí)���,b ≤ 3.7����;當(dāng)兩端自由轉(zhuǎn)動(dòng)時(shí)����,b≤ 2.6。
結(jié)論:本設(shè)計(jì)彈簧 b =1.76 ≤ 2.6����,因此彈簧穩(wěn)定性合適。
3 結(jié)語(yǔ)
搬運(yùn)機(jī)械手是現(xiàn)代機(jī)電一體化自動(dòng)生產(chǎn)線中重要的輔助裝置��。它可實(shí)現(xiàn)上下�、左右、伸縮六個(gè)方向的三維空間運(yùn)動(dòng)����,較適合經(jīng)常變更的生產(chǎn)與柔性制造生產(chǎn)的現(xiàn)代加工方法���。機(jī)械手爪作為機(jī)械手的重要組成部分,其設(shè)計(jì)的優(yōu)劣���, 對(duì)機(jī)械手的使用有直接的影響���。因此����,對(duì)機(jī)械手爪提出了重量輕便、結(jié)構(gòu)簡(jiǎn)易�、抓取穩(wěn)定、壽命長(zhǎng)久的設(shè)計(jì)要求����。
本文基于一款通用型機(jī)械手的設(shè)計(jì),介紹了機(jī)械手的總體結(jié)構(gòu)及工作原理,重點(diǎn)對(duì)機(jī)械手爪的設(shè)計(jì)進(jìn)行了計(jì)算校核,并對(duì)抓取誤差進(jìn)行了分析,為今后對(duì)機(jī)械手及抓取部件的設(shè)計(jì)提供了一種思路與方法。
參考文獻(xiàn)
[1]范芳蕾��,余宏濤���,張克義��,等.基于PLC的四軸搬運(yùn)機(jī)械手實(shí)驗(yàn)裝置的研究[J].裝備制造技術(shù),2017(10):80-83.
[2]龍創(chuàng)平��,陳豪.氣動(dòng)搬運(yùn)機(jī)械手機(jī)械結(jié)構(gòu)設(shè)計(jì)及分析[J].中國(guó)設(shè)備程,2018(01):133-134.
[3]李衛(wèi)民�,華雷.注塑機(jī)專用取件機(jī)械手結(jié)構(gòu)設(shè)計(jì)[J]. 機(jī)械工程師2018(07):52-54.
[4]王宇鋼,王朝.活塞桿搬運(yùn)機(jī)械手結(jié)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)學(xué)仿真[J].裝備制造術(shù),2018(06):5-8.
[5]胡傳松.沖床卸料機(jī)械手的結(jié)構(gòu)設(shè)計(jì)與有限元仿真[J].西安文理學(xué)院學(xué)報(bào)(自然科學(xué)版),2018,21(05):31-35.















 玻纖含量對(duì)長(zhǎng)玻纖...
玻纖含量對(duì)長(zhǎng)玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...













